GSoC 2025 - Week 06 Status Update
Week 6 progress
This week, I had the opportunity to attend the All Member Meeting (AMM) of Automotive Grade Linux (AGL), held in Berlin. The event featured numerous presentations covering a variety of topics including Software-Defined Vehicles, virtualization, vehicle communication, safety compliance, and much more.
Personal Interest
The meeting provided valuable insights into current trends within the open-source automotive ecosystem. It was also highly relevant to my GSoC project, as I had the chance to meet my mentors in person, Jan-Simon, Walt, and George.
PipeWire: State of the Union
I had the privilege of attending George’s session on the latest developments in the low-level multimedia library, PipeWire. He discussed several new features such as multithreaded execution on the server side, lazy scheduling, an FFmpeg video converter, and more. While many of these features might not be directly applicable to my current project, it is always beneficial to learn about the tools available within the library.
Software-Defined Vehicles (SDVs)
I had an idea about the buzzword of SDV but had not realized how developed and complex the topic is. Many sessions such as “Accelerating SDV Through Virtualization,” “How to Design SDV,” and “Advancing the Virtual Vehicle Fleet”, greatly expanded my understanding. I also learned about the emerging Eclipse OpenSOVD community, which was especially interesting.
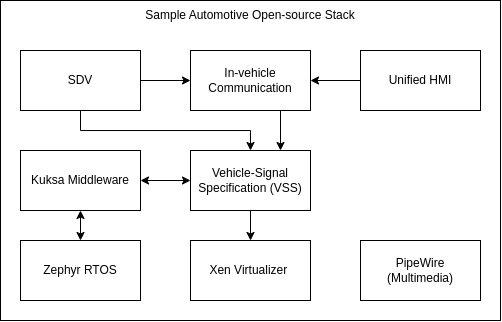
Stack of Open-Source Ecosystem
I was introduced to several open-source stacks that can be used to build a comprehensive ecosystem for vehicles, especially those that are connected or have autonomous capabilities. Based on what I learned, I combined several of these stacks into a single system (without adding AGL), illustrated in the following diagram:
Next Steps
- Learn more about the available automotive open-source tools.
- Adapt relevant open-source technologies in my GSoC project, if time allows.